
⮞ Département DOP ⮞ Thématiques de recherche ⮞ Activité « Polarimétrie, senseurs et imagerie » ⮞
Sommaire
Présentation
Le lidar (Light Detection and Ranging), est une technique d’imagerie de plus en plus répandue, notamment dans le contexte du développement de systèmes autonomes (voiture sans chauffeurs, drones) dans différents domaines d’applications (météorologie, aide à la navigation, surveillance, détection, détection de menace…) Dans l’équipe DOP, nous cherchons à améliorer les techniques Lidar existantes en proposant de nouvelles fonctionnalités pour des performances accrues.
Lidar-radar
Par rapport aux techniques lidar conventionnelles, où la distance à la cible est déduite de la mesure du temps de vol de l’impulsion lumineuse, le lidar-radar offre un certain nombre d’avantages. Il utilise une source lumineuse modulée au lieu d’impulsions laser. Il permet des mesures de vélocimétrie, et offre la possibilité de filtrer le signal en éliminant certaines composantes de bruit dans le signal de retour. Nous avons développé des techniques de génération de formes d’onde adaptées au lidar-radar, par réinjection décalée en fréquence dans un laser Q-switché. La cohérence de pulse à pulse de la modulation permet de réaliser des mesures de télémétrie lidar, ainsi que des mesures de vélocimétrie. La mise en œuvre de ce type de source laser à différentes longueurs d’onde (1 µm et 0.5 µm) permettant d’envisager différentes applications aériennes et sous-marines.

Lidar dual-comb cohérent
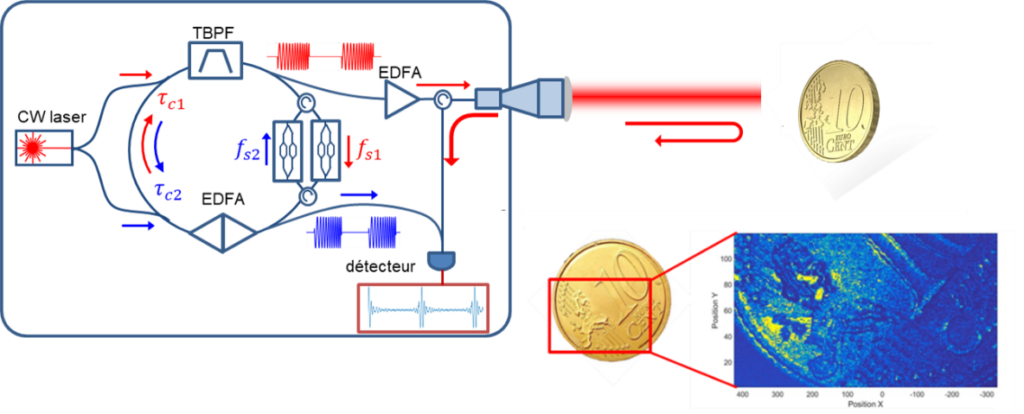
Le lidar par temps de vol comme le lidar-radar reposent sur la mesure de l’intensité lumineuse renvoyée par la cible. En lidar cohérent, ce n’est pas l’intensité lumineuse qui est détectée, mais le champ électrique, ce qui apporte d’autres avantages : portée en 1/r (au lieu de 1/r2), possibilité de mesurer des déplacements ou des vitesses à une précision interférométrique, et possibilité de filtrer le signal même à des échelles de temps courtes. Le lidar cohérent est par exemple utilisé pour l’anémométrie. La difficulté principale du lidar cohérent est la résolution spatiale : pour accéder à une résolution spatiale intéressante, il faut donc développer des sources lumineuses très cohérentes et large spectralement. L’interférométrie multi-hétérodyne (ou dual-comb), permet de réaliser des systèmes de lidar cohérent, à haute résolution (sub cm), et avec une bande passante de détection modérée. A l’Institut FOTON, nous développons des architectures dual-comb à partir de deux boucles à décalage de fréquence. L’une produit le peigne de fréquence de la voie de mesure, et l’autre celui de la voie de référence – ou oscillateur local. Outre sa simplicité, la spécificité de cette architecture est de pouvoir produire des formes d’ondes quasi-continues, tout en conservant une résolution limitée par le spectre grâce à un effet de compression d’impulsion. Des configurations utilisant des décaleurs acousto-optiques offrent une résolution spatiale de l’ordre du cm pour une distance d’ambiguïté de quelques mètres, tandis que les décaleurs électro-optiques permettent d’atteindre une résolution sub-millimétrique pour une distance d’ambiguïté de quelques dizaines de cm. Les applications de nos systèmes concernent la vision automatique à haute résolution ou l’imagerie sous-marine.
Financements
ANR (projet COCOA)
Personnels de recherche impliqués
Ingénieurs de recherche, chercheurs et Enseignants-Chercheurs
-

GUILLET DE CHATELLUS Hugues
02 23 23 47 29 Directeur de Recherche
-

BRUNEL Marc
02 23 23 55 73 Professeur des universités
-

VALLET Marc
02 23 23 62 04 Professeur des universités Responsable de département
-

LOAS Goulc’hen
02 23 23 68 81 Ingénieur de recherche
Doctorants et Post-doctorants
-

ALLIOT DE BORGGRAEF Louis
Doctorant (09/2022-11/2024)
Pour en savoir plus
- Marc Vallet, Jonathan Barreaux, Marco Romanelli, Grégoire Pillet, Jérémie Thévenin, et al.. Lidar-radar velocimetry using a pulse-to-pulse coherent rf-modulated Q-switched laser.. Applied optics, 2013, 52 (22), pp.5402-10. ⟨10.1364/AO.52.005402⟩. ⟨hal-00854261⟩
- Haiyang Zhang, Marc Brunel, Marco Romanelli, Marc Vallet. Green pulsed lidar-radar emitter based on a multipass frequency-shifting external cavity. Applied optics, 2016, 55 (10), pp.2467–2473. ⟨10.1364/AO.55.002467⟩. ⟨hal-01343399⟩
- Haiyang Zhang, Marc Brunel, Marco Romanelli, Marc Vallet. Green pulsed lidar-radar emitter based on a multipass frequency-shifting external cavity. Applied optics, 2016, 55 (10), pp.2467–2473. ⟨10.1364/AO.55.002467⟩. ⟨hal-01343399⟩
- Juan Clement, Côme Schnebelin, Hugues Guillet de Chatellus, Carlos Fernández-Pousa. Laser ranging using coherent pulse compression with frequency shifting loops. Optics Express, 2019, 27 (9), pp.12000. ⟨10.1364/OE.27.012000⟩. ⟨hal-02102231⟩
- Vincent Billault, Vicente Durán, Carlos R Fernández-Pousa, Vincent Crozatier, Daniel Dolfi, et al.. All-optical coherent pulse compression for dynamic laser ranging using an acousto-optic dual comb. Optics Express, 2021, 29, ⟨10.1364/oe.430998⟩. ⟨hal-03441638⟩